Class to define Cartesian pose in Cartesian space as 3D position and quaternion based orientation. More...
#include <CartesianPose.hpp>
Public Member Functions | |
| const Eigen::Vector3d & | get_linear_velocity () const =delete |
| const Eigen::Vector3d & | get_angular_velocity () const =delete |
| Eigen::Matrix< double, 6, 1 > | get_twist () const =delete |
| const Eigen::Vector3d & | get_linear_acceleration () const =delete |
| const Eigen::Vector3d & | get_angular_acceleration () const =delete |
| Eigen::Matrix< double, 6, 1 > | get_acceleration () const =delete |
| const Eigen::Vector3d & | get_force () const =delete |
| const Eigen::Vector3d & | get_torque () const =delete |
| Eigen::Matrix< double, 6, 1 > | get_wrench () const =delete |
| void | set_linear_velocity (const Eigen::Vector3d &linear_velocity)=delete |
| void | set_linear_velocity (const std::vector< double > &linear_velocity)=delete |
| void | set_linear_velocity (const double &x, const double &y, const double &z)=delete |
| void | set_angular_velocity (const Eigen::Vector3d &angular_velocity)=delete |
| void | set_angular_velocity (const std::vector< double > &angular_velocity)=delete |
| void | set_angular_velocity (const double &x, const double &y, const double &z)=delete |
| void | set_twist (const Eigen::Matrix< double, 6, 1 > &twist)=delete |
| void | set_twist (const std::vector< double > &twist)=delete |
| void | set_linear_acceleration (const Eigen::Vector3d &linear_acceleration)=delete |
| void | set_linear_acceleration (const std::vector< double > &linear_acceleration)=delete |
| void | set_linear_acceleration (const double &x, const double &y, const double &z)=delete |
| void | set_angular_acceleration (const Eigen::Vector3d &angular_acceleration)=delete |
| void | set_angular_acceleration (const std::vector< double > &angular_acceleration)=delete |
| void | set_angular_acceleration (const double &x, const double &y, const double &z)=delete |
| void | set_acceleration (const Eigen::Matrix< double, 6, 1 > &acceleration)=delete |
| void | set_acceleration (const std::vector< double > &acceleration)=delete |
| void | set_force (const Eigen::Vector3d &force)=delete |
| void | set_force (const std::vector< double > &force)=delete |
| void | set_force (const double &x, const double &y, const double &z)=delete |
| void | set_torque (const Eigen::Vector3d &torque)=delete |
| void | set_torque (const std::vector< double > &torque)=delete |
| void | set_torque (const double &x, const double &y, const double &z)=delete |
| void | set_wrench (const Eigen::Matrix< double, 6, 1 > &wrench)=delete |
| void | set_wrench (const std::vector< double > &wrench)=delete |
| CartesianPose & | operator*= (const CartesianTwist &twist)=delete |
| CartesianPose & | operator*= (const CartesianAcceleration &acceleration)=delete |
| CartesianPose & | operator*= (const CartesianWrench &wrench)=delete |
| CartesianState & | operator+= (const CartesianTwist &twist)=delete |
| CartesianState & | operator+= (const CartesianAcceleration &acceleration)=delete |
| CartesianState & | operator+= (const CartesianWrench &wrench)=delete |
| CartesianState | operator+ (const CartesianTwist &twist) const =delete |
| CartesianState | operator+ (const CartesianAcceleration &acceleration) const =delete |
| CartesianState | operator+ (const CartesianWrench &wrench) const =delete |
| CartesianState & | operator-= (const CartesianTwist &twist)=delete |
| CartesianState & | operator-= (const CartesianAcceleration &acceleration)=delete |
| CartesianState & | operator-= (const CartesianWrench &wrench)=delete |
| CartesianState | operator- (const CartesianTwist &twist) const =delete |
| CartesianState | operator- (const CartesianAcceleration &acceleration) const =delete |
| CartesianState | operator- (const CartesianWrench &wrench) const =delete |
| CartesianPose () | |
| Empty constructor. | |
| CartesianPose (const std::string &name, const std::string &reference="world") | |
| Constructor with name and reference frame provided. | |
| CartesianPose (const CartesianPose &pose) | |
| Copy constructor. | |
| CartesianPose (const CartesianState &state) | |
| Copy constructor from a Cartesian state. | |
| CartesianPose (const CartesianTwist &twist) | |
| Copy constructor from a Cartesian twist by considering that it is a displacement over 1 second. | |
| CartesianPose (const std::string &name, const Eigen::Vector3d &position, const std::string &reference="world") | |
| Constructor of a Cartesian pose from a position given as a vector of coordinates. | |
| CartesianPose (const std::string &name, double x, double y, double z, const std::string &reference="world") | |
| Constructor of a Cartesian pose from a position given as three scalar coordinates. | |
| CartesianPose (const std::string &name, const Eigen::Quaterniond &orientation, const std::string &reference="world") | |
| Constructor of a Cartesian pose from a quaternion. | |
| CartesianPose (const std::string &name, const Eigen::Vector3d &position, const Eigen::Quaterniond &orientation, const std::string &reference="world") | |
| Constructor of a Cartesian pose from a position given as a vector of coordinates and a quaternion. | |
| CartesianPose & | operator= (const CartesianPose &pose)=default |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| Eigen::VectorXd | data () const override |
| Returns the pose data as an Eigen vector. | |
| void | set_data (const Eigen::VectorXd &data) override |
| Set the pose data from an Eigen vector. | |
| void | set_data (const std::vector< double > &data) override |
| Set the pose data from a std vector. | |
| CartesianPose | copy () const |
| Return a copy of the Cartesian pose. | |
| CartesianPose | inverse () const |
| Compute the inverse of the current Cartesian pose. | |
| CartesianPose | normalized (const CartesianStateVariable &state_variable_type=CartesianStateVariable::POSE) const |
| Compute the normalized pose at the state variable given in argument (default is full pose) | |
| std::vector< double > | norms (const CartesianStateVariable &state_variable_type=CartesianStateVariable::POSE) const override |
| Compute the norms of the state variable specified by the input type (default is full pose) | |
| CartesianPose & | operator*= (const CartesianState &state) |
| Transform inplace a Cartesian state into the current reference frame. | |
| CartesianPose & | operator*= (const CartesianPose &pose) |
| Transform inplace a Cartesian pose into the current reference frame. | |
| CartesianState | operator* (const CartesianState &state) const |
| Transform a Cartesian state into the pose reference frame. | |
| CartesianPose | operator* (const CartesianPose &pose) const |
| Transform a Cartesian pose into the left operand pose reference frame. | |
| CartesianTwist | operator* (const CartesianTwist &twist) const |
| Transform a Cartesian twist into the pose reference frame. | |
| CartesianAcceleration | operator* (const CartesianAcceleration &acceleration) const |
| Transform a Cartesian acceleration into the pose reference frame. | |
| CartesianWrench | operator* (const CartesianWrench &wrench) const |
| Transform a Cartesian wrench into the pose reference frame. | |
| CartesianPose & | operator*= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianPose | operator* (double lambda) const |
| Scale a Cartesian pose by a scalar. | |
| CartesianPose & | operator/= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianPose | operator/ (double lambda) const |
| Scale a Cartesian pose by a scalar. | |
| CartesianTwist | operator/ (const std::chrono::nanoseconds &dt) const |
| Differentiate a Cartesian pose over a time period. | |
| CartesianPose & | operator+= (const CartesianPose &pose) |
| Add inplace another Cartesian pose. | |
| CartesianPose & | operator+= (const CartesianState &state) |
| Add inplace another pose from a Cartesian state. | |
| CartesianPose | operator+ (const CartesianPose &pose) const |
| Add another Cartesian pose. | |
| CartesianState | operator+ (const CartesianState &state) const |
| Add another Cartesian state. | |
| CartesianPose | operator- () const |
| Negate a Cartesian pose. | |
| CartesianPose & | operator-= (const CartesianPose &pose) |
| Compute inplace the difference with another Cartesian pose. | |
| CartesianPose & | operator-= (const CartesianState &state) |
| Compute inplace the difference with another Cartesian state. | |
| CartesianPose | operator- (const CartesianPose &pose) const |
| Compute the difference with another Cartesian pose. | |
| CartesianState | operator- (const CartesianState &state) const |
| Compute the difference with a Cartesian state. | |
 Public Member Functions inherited from state_representation::CartesianState Public Member Functions inherited from state_representation::CartesianState | |
| CartesianState () | |
| Empty constructor. | |
| CartesianState (const std::string &name, const std::string &reference="world") | |
| Constructor with name and reference frame provided. | |
| CartesianState (const CartesianState &state) | |
| Copy constructor of a Cartesian state. | |
| CartesianState & | operator= (const CartesianState &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const Eigen::Vector3d & | get_position () const |
| Getter of the position attribute. | |
| const Eigen::Quaterniond & | get_orientation () const |
| Getter of the orientation attribute. | |
| Eigen::Vector4d | get_orientation_coefficients () const |
| Getter of the orientation attribute as Vector4d of coefficients. | |
| Eigen::Matrix< double, 7, 1 > | get_pose () const |
| Getter of the pose from position and orientation attributes. | |
| Eigen::Matrix4d | get_transformation_matrix () const |
| Getter of a pose from position and orientation attributes. | |
| const Eigen::Vector3d & | get_linear_velocity () const |
| Getter of the linear velocity attribute. | |
| const Eigen::Vector3d & | get_angular_velocity () const |
| Getter of the angular velocity attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_twist () const |
| Getter of the 6d twist from linear and angular velocity attributes. | |
| const Eigen::Vector3d & | get_linear_acceleration () const |
| Getter of the linear acceleration attribute. | |
| const Eigen::Vector3d & | get_angular_acceleration () const |
| Getter of the angular acceleration attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_acceleration () const |
| Getter of the 6d acceleration from linear and angular acceleration attributes. | |
| const Eigen::Vector3d & | get_force () const |
| Getter of the force attribute. | |
| const Eigen::Vector3d & | get_torque () const |
| Getter of the torque attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_wrench () const |
| Getter of the 6d wrench from force and torque attributes. | |
| Eigen::ArrayXd | array () const |
| Return the data vector as an Eigen Array. | |
| std::vector< double > | to_std_vector () const |
| Return the state as a std vector. | |
| void | set_position (const Eigen::Vector3d &position) |
| Setter of the position. | |
| void | set_position (const std::vector< double > &position) |
| Setter of the position from a std vector. | |
| void | set_position (const double &x, const double &y, const double &z) |
| Setter of the position from three scalar coordinates. | |
| void | set_orientation (const Eigen::Quaterniond &orientation) |
| Setter of the orientation. | |
| void | set_orientation (const Eigen::Vector4d &orientation) |
| Setter of the orientation from a 4d vector. | |
| void | set_orientation (const std::vector< double > &orientation) |
| Setter of the orientation from a std vector. | |
| void | set_orientation (const double &w, const double &x, const double &y, const double &z) |
| Setter of the orientation from four scalar coefficients (w, x, y, z) | |
| void | set_pose (const Eigen::Vector3d &position, const Eigen::Quaterniond &orientation) |
| Setter of the pose from both position and orientation. | |
| void | set_pose (const Eigen::Matrix< double, 7, 1 > &pose) |
| Setter of the pose from both position and orientation as Eigen 7d vector. | |
| void | set_pose (const std::vector< double > &pose) |
| Setter of the pose from both position and orientation as std vector. | |
| void | set_linear_velocity (const Eigen::Vector3d &linear_velocity) |
| Setter of the linear velocity attribute. | |
| void | set_linear_velocity (const std::vector< double > &linear_velocity) |
| Setter of the linear velocity from a std vector. | |
| void | set_linear_velocity (const double &x, const double &y, const double &z) |
| Setter of the linear velocity from three scalar coordinates. | |
| void | set_angular_velocity (const Eigen::Vector3d &angular_velocity) |
| Setter of the angular velocity attribute. | |
| void | set_angular_velocity (const std::vector< double > &angular_velocity) |
| Setter of the angular velocity from a std vector. | |
| void | set_angular_velocity (const double &x, const double &y, const double &z) |
| Setter of the angular velocity from three scalar coordinates. | |
| void | set_twist (const Eigen::Matrix< double, 6, 1 > &twist) |
| Setter of the linear and angular velocities from a 6d twist vector. | |
| void | set_twist (const std::vector< double > &twist) |
| Setter of the linear and angular velocities from a std vector. | |
| void | set_linear_acceleration (const Eigen::Vector3d &linear_acceleration) |
| Setter of the linear acceleration attribute. | |
| void | set_linear_acceleration (const std::vector< double > &linear_acceleration) |
| Setter of the linear acceleration from a std vector. | |
| void | set_linear_acceleration (const double &x, const double &y, const double &z) |
| Setter of the linear acceleration from three scalar coordinates. | |
| void | set_angular_acceleration (const Eigen::Vector3d &angular_acceleration) |
| Setter of the angular velocity attribute. | |
| void | set_angular_acceleration (const std::vector< double > &angular_acceleration) |
| Setter of the angular acceleration from a std vector. | |
| void | set_angular_acceleration (const double &x, const double &y, const double &z) |
| Setter of the angular acceleration from three scalar coordinates. | |
| void | set_acceleration (const Eigen::Matrix< double, 6, 1 > &acceleration) |
| Setter of the linear and angular acceleration from a 6d acceleration vector. | |
| void | set_acceleration (const std::vector< double > &acceleration) |
| Setter of the linear and angular acceleration from a std vector. | |
| void | set_force (const Eigen::Vector3d &force) |
| Setter of the force attribute. | |
| void | set_force (const std::vector< double > &force) |
| Setter of the force from a std vector. | |
| void | set_force (const double &x, const double &y, const double &z) |
| Setter of the force from three scalar coordinates. | |
| void | set_torque (const Eigen::Vector3d &torque) |
| Setter of the torque attribute. | |
| void | set_torque (const std::vector< double > &torque) |
| Setter of the torque from a std vector. | |
| void | set_torque (const double &x, const double &y, const double &z) |
| Setter of the torque from three scalar coordinates. | |
| void | set_wrench (const Eigen::Matrix< double, 6, 1 > &wrench) |
| Setter of the force and torque from a 6d wrench vector. | |
| void | set_wrench (const std::vector< double > &wrench) |
| Setter of the force and torque from a std vector. | |
| void | set_zero () |
| Set the State to a zero value. | |
| void | clamp_state_variable (double max_norm, const CartesianStateVariable &state_variable_type, double noise_ratio=0) |
| Clamp inplace the norm of the a specific state variable. | |
| CartesianState | copy () const |
| Return a copy of the Cartesian state. | |
| double | dist (const CartesianState &state, const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) const |
| Compute the distance to another state as the sum of distances between each features. | |
| void | reset () override |
| Reset the object to a post-construction state. | |
| CartesianState | inverse () const |
| Compute the inverse of the current Cartesian state. | |
| void | normalize (const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) |
| Normalize inplace the state at the state variable given in argument. Default is full state. | |
| CartesianState | normalized (const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) const |
| Compute the normalized state at the state variable given in argument. Default is full state. | |
| CartesianState & | operator*= (const CartesianState &state) |
| Transform inplace a Cartesian state into the current reference frame. | |
| CartesianState | operator* (const CartesianState &state) const |
| Transform a Cartesian state into the left operand state reference frame. | |
| CartesianState & | operator*= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianState | operator* (double lambda) const |
| Scale a Cartesian pose by a scalar. | |
| Eigen::Vector3d | operator* (const Eigen::Vector3d &vector) const |
| Transform a vector into the state reference frame. | |
| CartesianState & | operator/= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianState | operator/ (double lambda) const |
| Scale a Cartesian state by a scalar. | |
| CartesianState & | operator+= (const CartesianState &state) |
| Add inplace another Cartesian state. | |
| CartesianState | operator+ (const CartesianState &state) const |
| Add another Cartesian state. | |
| CartesianState | operator- () const |
| Negate a Cartesian state. | |
| CartesianState & | operator-= (const CartesianState &state) |
| Compute inplace the difference with another Cartesian state. | |
| CartesianState | operator- (const CartesianState &state) const |
| Compute the difference with another Cartesian state. | |
| Public Member Functions inherited from state_representation::SpatialState | |
| SpatialState () | |
| Empty constructor. | |
| SpatialState (const std::string &name, const std::string &reference_frame="world") | |
| Constructor with name and reference frame specification. | |
| SpatialState (const SpatialState &state) | |
| Copy constructor from another spatial state. | |
| SpatialState & | operator= (const SpatialState &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const std::string & | get_reference_frame () const |
| Getter of the reference frame as const reference. | |
| virtual void | set_reference_frame (const std::string &reference_frame) |
| Setter of the reference frame. | |
| bool | is_incompatible (const State &state) const override |
| Check if the spatial state is incompatible for operations with the state given as argument. | |
| Public Member Functions inherited from state_representation::State | |
| State () | |
| Empty constructor. | |
| State (const std::string &name) | |
| Constructor with name specification. | |
| State (const State &state) | |
| Copy constructor from another state. | |
| virtual | ~State ()=default |
| Virtual destructor. | |
| State & | operator= (const State &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const StateType & | get_type () const |
| Getter of the type attribute. | |
| const std::string & | get_name () const |
| Getter of the name attribute. | |
| bool | is_empty () const |
| Getter of the empty attribute. | |
| const std::chrono::time_point< std::chrono::steady_clock > & | get_timestamp () const |
| Getter of the timestamp attribute. | |
| virtual void | set_name (const std::string &name) |
| Setter of the name attribute. | |
| void | reset_timestamp () |
| Reset the timestamp attribute to now. | |
| virtual void | set_data (const Eigen::MatrixXd &data) |
| Set the data of the state from an Eigen matrix. | |
| double | get_age () const |
| Get the age of the state, i.e. the time since the last modification. | |
| bool | is_deprecated (double time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| template<typename DurationT > | |
| bool | is_deprecated (const std::chrono::duration< int64_t, DurationT > &time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| operator bool () const noexcept | |
| Boolean operator for the truthiness of a state. | |
Static Public Member Functions | |
| static CartesianPose | Identity (const std::string &name, const std::string &reference="world") |
| Constructor for the identity pose. | |
| static CartesianPose | Random (const std::string &name, const std::string &reference="world") |
| Constructor for a random pose. | |
| Static Public Member Functions inherited from state_representation::CartesianState | |
| static CartesianState | Identity (const std::string &name, const std::string &reference="world") |
| Constructor for the identity Cartesian state (identity pose and 0 for the rest) | |
| static CartesianState | Random (const std::string &name, const std::string &reference="world") |
| Constructor for a random Cartesian state. | |
Friends | |
| CartesianPose | operator* (double lambda, const CartesianPose &pose) |
| Scale a Cartesian pose by a scalar. | |
| std::ostream & | operator<< (std::ostream &os, const CartesianPose &pose) |
| Overload the ostream operator for printing. | |
Additional Inherited Members | |
| Protected Member Functions inherited from state_representation::CartesianState | |
| Eigen::VectorXd | get_state_variable (const CartesianStateVariable &state_variable_type) const |
| Getter of the variable value corresponding to the input. | |
| void | set_state_variable (const Eigen::VectorXd &new_value, const CartesianStateVariable &state_variable_type) |
| Setter of the variable value corresponding to the input. | |
| void | set_state_variable (const std::vector< double > &new_value, const CartesianStateVariable &state_variable_type) |
| Setter of the variable value corresponding to the input. | |
| std::string | to_string () const override |
| Convert the state to its string representation. | |
| Protected Member Functions inherited from state_representation::SpatialState | |
| std::string | to_string () const override |
| Convert the state to its string representation. | |
| Protected Member Functions inherited from state_representation::State | |
| void | set_type (const StateType &type) |
| Setter of the state type attribute. | |
| void | set_empty (bool empty=true) |
| Setter of the empty attribute. | |
| void | assert_not_empty () const |
| Throw an exception if the state is empty. | |
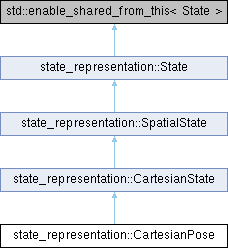
Detailed Description
Class to define Cartesian pose in Cartesian space as 3D position and quaternion based orientation.
Definition at line 18 of file CartesianPose.hpp.
Constructor & Destructor Documentation
◆ CartesianPose() [1/9]
|
explicit |
Empty constructor.
Definition at line 9 of file CartesianPose.cpp.
◆ CartesianPose() [2/9]
|
explicit |
Constructor with name and reference frame provided.
- Parameters
-
name The name of the state reference The name of the reference frame (default is "world")
Definition at line 13 of file CartesianPose.cpp.
◆ CartesianPose() [3/9]
| state_representation::CartesianPose::CartesianPose | ( | const CartesianPose & | pose | ) |
Copy constructor.
Definition at line 54 of file CartesianPose.cpp.
◆ CartesianPose() [4/9]
| state_representation::CartesianPose::CartesianPose | ( | const CartesianState & | state | ) |
Copy constructor from a Cartesian state.
Definition at line 46 of file CartesianPose.cpp.
◆ CartesianPose() [5/9]
| state_representation::CartesianPose::CartesianPose | ( | const CartesianTwist & | twist | ) |
Copy constructor from a Cartesian twist by considering that it is a displacement over 1 second.
Definition at line 56 of file CartesianPose.cpp.
◆ CartesianPose() [6/9]
|
explicit |
Constructor of a Cartesian pose from a position given as a vector of coordinates.
- Parameters
-
name The name of the state position The position data given as Eigen vector reference The name of the reference frame (default is "world")
Definition at line 17 of file CartesianPose.cpp.
◆ CartesianPose() [7/9]
|
explicit |
Constructor of a Cartesian pose from a position given as three scalar coordinates.
- Parameters
-
name The name of the state x The x coordinate of the position y The y coordinate of the position z The z coordinate of the position reference The name of the reference frame (default is "world")
Definition at line 23 of file CartesianPose.cpp.
◆ CartesianPose() [8/9]
|
explicit |
Constructor of a Cartesian pose from a quaternion.
- Parameters
-
name The name of the state orientation The orientation given as Eigen quaternion reference The name of the reference frame (default is "world")
Definition at line 30 of file CartesianPose.cpp.
◆ CartesianPose() [9/9]
|
explicit |
Constructor of a Cartesian pose from a position given as a vector of coordinates and a quaternion.
- Parameters
-
name The name of the state position The position data given as Eigen vector orientation The orientation given as Eigen quaternion reference The name of the reference frame (default is "world")
Definition at line 37 of file CartesianPose.cpp.
Member Function Documentation
◆ copy()
| CartesianPose state_representation::CartesianPose::copy | ( | ) | const |
Return a copy of the Cartesian pose.
Definition at line 82 of file CartesianPose.cpp.
◆ data()
|
overridevirtual |
Returns the pose data as an Eigen vector.
Reimplemented from state_representation::CartesianState.
Definition at line 66 of file CartesianPose.cpp.
◆ Identity()
|
static |
Constructor for the identity pose.
- Parameters
-
name The name of the state reference The name of the reference frame (default is "world")
- Returns
- Cartesian identity pose
Definition at line 58 of file CartesianPose.cpp.
◆ inverse()
| CartesianPose state_representation::CartesianPose::inverse | ( | ) | const |
Compute the inverse of the current Cartesian pose.
- Returns
- The inverse corresponding to b_S_f (assuming this is f_S_b)
Definition at line 87 of file CartesianPose.cpp.
◆ normalized()
| CartesianPose state_representation::CartesianPose::normalized | ( | const CartesianStateVariable & | state_variable_type = CartesianStateVariable::POSE | ) | const |
Compute the normalized pose at the state variable given in argument (default is full pose)
- Parameters
-
state_variable_type The type of state variable to compute the norms on
- Returns
- The normalized pose FIXME: state variable type doesnt make sense here
Definition at line 91 of file CartesianPose.cpp.
◆ norms()
|
overridevirtual |
Compute the norms of the state variable specified by the input type (default is full pose)
- Parameters
-
state_variable_type The type of state variable to compute the norms on
- Returns
- The norms of the state variables as a vector
Reimplemented from state_representation::CartesianState.
Definition at line 95 of file CartesianPose.cpp.
◆ operator*() [1/6]
| CartesianAcceleration state_representation::CartesianPose::operator* | ( | const CartesianAcceleration & | acceleration | ) | const |
Transform a Cartesian acceleration into the pose reference frame.
: For a pose A expressed in reference frame W multiplied with an acceleration B expressed in reference frame A, the result of the transformation is an acceleration B expressed in reference frame W.
- Parameters
-
acceleration A Cartesian acceleration expressed in the pose frame
- Returns
- The transformed acceleration expressed in the pose reference frame
Definition at line 121 of file CartesianPose.cpp.
◆ operator*() [2/6]
| CartesianPose state_representation::CartesianPose::operator* | ( | const CartesianPose & | pose | ) | const |
Transform a Cartesian pose into the left operand pose reference frame.
: For a pose A expressed in reference frame W multiplied with a pose B expressed in reference frame A, the result of the transformation is a pose B expressed in reference frame W.
- Parameters
-
pose A Cartesian pose expressed in the left operand pose frame
- Returns
- The transformed pose expressed in the left operand pose reference frame
Definition at line 113 of file CartesianPose.cpp.
◆ operator*() [3/6]
| CartesianState state_representation::CartesianPose::operator* | ( | const CartesianState & | state | ) | const |
Transform a Cartesian state into the pose reference frame.
: For a pose A expressed in reference frame W multiplied with a state B expressed in reference frame A, the result of the transformation is a state B expressed in reference frame W.
- Parameters
-
state A Cartesian state expressed in the pose frame
- Returns
- The transformed state expressed in the pose reference frame
Definition at line 109 of file CartesianPose.cpp.
◆ operator*() [4/6]
| CartesianTwist state_representation::CartesianPose::operator* | ( | const CartesianTwist & | twist | ) | const |
Transform a Cartesian twist into the pose reference frame.
: For a pose A expressed in reference frame W multiplied with a twist B expressed in reference frame A, the result of the transformation is a twist B expressed in reference frame W.
- Parameters
-
twist A Cartesian twist expressed in the pose frame
- Returns
- The transformed twist expressed in the pose reference frame
Definition at line 117 of file CartesianPose.cpp.
◆ operator*() [5/6]
| CartesianWrench state_representation::CartesianPose::operator* | ( | const CartesianWrench & | wrench | ) | const |
Transform a Cartesian wrench into the pose reference frame.
: For a pose A expressed in reference frame W multiplied with a wrench B expressed in reference frame A, the result of the transformation is a wrench B expressed in reference frame W.
- Parameters
-
wrench A Cartesian wrench expressed in the pose frame
- Returns
- The transformed wrench expressed in the pose reference frame
Definition at line 125 of file CartesianPose.cpp.
◆ operator*() [6/6]
| CartesianPose state_representation::CartesianPose::operator* | ( | double | lambda | ) | const |
Scale a Cartesian pose by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The scaled Cartesian pose
Definition at line 134 of file CartesianPose.cpp.
◆ operator*=() [1/3]
| CartesianPose & state_representation::CartesianPose::operator*= | ( | const CartesianPose & | pose | ) |
Transform inplace a Cartesian pose into the current reference frame.
: For a pose A expressed in reference frame W multiplied with a pose B expressed in reference frame A, the result of the transformation is a pose B expressed in reference frame W.
- Parameters
-
pose A Cartesian pose expressed in the current pose frame
- Returns
- The transformed pose expressed in the original reference frame
Definition at line 104 of file CartesianPose.cpp.
◆ operator*=() [2/3]
| CartesianPose & state_representation::CartesianPose::operator*= | ( | const CartesianState & | state | ) |
Transform inplace a Cartesian state into the current reference frame.
: For a pose A expressed in reference frame W multiplied with a state B expressed in reference frame A, the result of the transformation is a pose B expressed in reference frame W.
- Parameters
-
state A Cartesian state expressed in the current pose frame
- Returns
- The transformed pose expressed in the original reference frame
Definition at line 99 of file CartesianPose.cpp.
◆ operator*=() [3/3]
| CartesianPose & state_representation::CartesianPose::operator*= | ( | double | lambda | ) |
Scale inplace by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian pose
Definition at line 129 of file CartesianPose.cpp.
◆ operator+() [1/2]
| CartesianPose state_representation::CartesianPose::operator+ | ( | const CartesianPose & | pose | ) | const |
Add another Cartesian pose.
- Parameters
-
pose A Cartesian pose in the same reference frame
- Returns
- The combined Cartesian pose
Definition at line 175 of file CartesianPose.cpp.
◆ operator+() [2/2]
| CartesianState state_representation::CartesianPose::operator+ | ( | const CartesianState & | state | ) | const |
Add another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The combined Cartesian state
Definition at line 179 of file CartesianPose.cpp.
◆ operator+=() [1/2]
| CartesianPose & state_representation::CartesianPose::operator+= | ( | const CartesianPose & | pose | ) |
Add inplace another Cartesian pose.
- Parameters
-
pose A Cartesian pose in the same reference frame
- Returns
- The reference to the combined Cartesian pose
Definition at line 165 of file CartesianPose.cpp.
◆ operator+=() [2/2]
| CartesianPose & state_representation::CartesianPose::operator+= | ( | const CartesianState & | state | ) |
Add inplace another pose from a Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The reference to the combined Cartesian pose
Definition at line 170 of file CartesianPose.cpp.
◆ operator-() [1/3]
| CartesianPose state_representation::CartesianPose::operator- | ( | ) | const |
Negate a Cartesian pose.
- Returns
- The negative value of the Cartesian pose
Definition at line 183 of file CartesianPose.cpp.
◆ operator-() [2/3]
| CartesianPose state_representation::CartesianPose::operator- | ( | const CartesianPose & | pose | ) | const |
Compute the difference with another Cartesian pose.
- Parameters
-
pose A Cartesian pose in the same reference frame
- Returns
- The difference in pose
Definition at line 197 of file CartesianPose.cpp.
◆ operator-() [3/3]
| CartesianState state_representation::CartesianPose::operator- | ( | const CartesianState & | state | ) | const |
Compute the difference with a Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The difference in all the state variables
Definition at line 201 of file CartesianPose.cpp.
◆ operator-=() [1/2]
| CartesianPose & state_representation::CartesianPose::operator-= | ( | const CartesianPose & | pose | ) |
Compute inplace the difference with another Cartesian pose.
- Parameters
-
pose A Cartesian pose in the same reference frame
- Returns
- The reference to the difference in pose
Definition at line 187 of file CartesianPose.cpp.
◆ operator-=() [2/2]
| CartesianPose & state_representation::CartesianPose::operator-= | ( | const CartesianState & | state | ) |
Compute inplace the difference with another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The reference to the difference in pose
Definition at line 192 of file CartesianPose.cpp.
◆ operator/() [1/2]
| CartesianTwist state_representation::CartesianPose::operator/ | ( | const std::chrono::nanoseconds & | dt | ) | const |
Differentiate a Cartesian pose over a time period.
- Parameters
-
dt The time period used for derivation
- Returns
- The resulting Cartesian twist after derivation
Definition at line 151 of file CartesianPose.cpp.
◆ operator/() [2/2]
| CartesianPose state_representation::CartesianPose::operator/ | ( | double | lambda | ) | const |
Scale a Cartesian pose by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The scaled Cartesian acceleration
Definition at line 147 of file CartesianPose.cpp.
◆ operator/=()
| CartesianPose & state_representation::CartesianPose::operator/= | ( | double | lambda | ) |
Scale inplace by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian pose
Definition at line 142 of file CartesianPose.cpp.
◆ operator=()
|
default |
Copy assignment operator that has to be defined to the custom assignment operator.
- Parameters
-
pose The pose with value to assign
- Returns
- Reference to the current pose with new values
◆ Random()
|
static |
Constructor for a random pose.
- Parameters
-
name The name of the state reference The name of the reference frame (default is "world")
- Returns
- Cartesian random pose
Definition at line 62 of file CartesianPose.cpp.
◆ set_data() [1/2]
|
overridevirtual |
Set the pose data from an Eigen vector.
Reimplemented from state_representation::CartesianState.
Definition at line 70 of file CartesianPose.cpp.
◆ set_data() [2/2]
|
overridevirtual |
Set the pose data from a std vector.
Reimplemented from state_representation::CartesianState.
Definition at line 78 of file CartesianPose.cpp.
Friends And Related Symbol Documentation
◆ operator*
|
friend |
Scale a Cartesian pose by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor pose The Cartesian pose to be scaled
- Returns
- The scaled Cartesian pose
Definition at line 138 of file CartesianPose.cpp.
◆ operator<<
|
friend |
Overload the ostream operator for printing.
- Parameters
-
os The ostream to append the string representing the Cartesian pose to CartesianPose The Cartesian pose to print
- Returns
- The appended ostream
Definition at line 205 of file CartesianPose.cpp.
The documentation for this class was generated from the following files:
- /github/workspace/source/state_representation/include/state_representation/space/cartesian/CartesianPose.hpp
- /github/workspace/source/state_representation/src/space/cartesian/CartesianPose.cpp