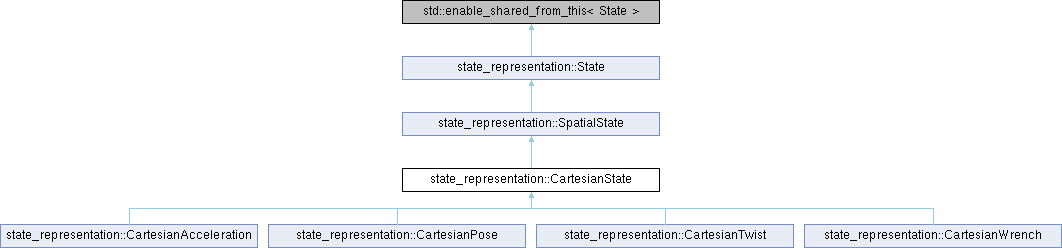
Class to represent a state in Cartesian space. More...
#include <CartesianState.hpp>
Public Member Functions | |
| CartesianState () | |
| Empty constructor. | |
| CartesianState (const std::string &name, const std::string &reference="world") | |
| Constructor with name and reference frame provided. | |
| CartesianState (const CartesianState &state) | |
| Copy constructor of a Cartesian state. | |
| CartesianState & | operator= (const CartesianState &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const Eigen::Vector3d & | get_position () const |
| Getter of the position attribute. | |
| const Eigen::Quaterniond & | get_orientation () const |
| Getter of the orientation attribute. | |
| Eigen::Vector4d | get_orientation_coefficients () const |
| Getter of the orientation attribute as Vector4d of coefficients. | |
| Eigen::Matrix< double, 7, 1 > | get_pose () const |
| Getter of the pose from position and orientation attributes. | |
| Eigen::Matrix4d | get_transformation_matrix () const |
| Getter of a pose from position and orientation attributes. | |
| const Eigen::Vector3d & | get_linear_velocity () const |
| Getter of the linear velocity attribute. | |
| const Eigen::Vector3d & | get_angular_velocity () const |
| Getter of the angular velocity attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_twist () const |
| Getter of the 6d twist from linear and angular velocity attributes. | |
| const Eigen::Vector3d & | get_linear_acceleration () const |
| Getter of the linear acceleration attribute. | |
| const Eigen::Vector3d & | get_angular_acceleration () const |
| Getter of the angular acceleration attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_acceleration () const |
| Getter of the 6d acceleration from linear and angular acceleration attributes. | |
| const Eigen::Vector3d & | get_force () const |
| Getter of the force attribute. | |
| const Eigen::Vector3d & | get_torque () const |
| Getter of the torque attribute. | |
| Eigen::Matrix< double, 6, 1 > | get_wrench () const |
| Getter of the 6d wrench from force and torque attributes. | |
| virtual Eigen::VectorXd | data () const |
| Return the data as the concatenation of all the state variables in a single vector. | |
| Eigen::ArrayXd | array () const |
| Return the data vector as an Eigen Array. | |
| std::vector< double > | to_std_vector () const |
| Return the state as a std vector. | |
| void | set_position (const Eigen::Vector3d &position) |
| Setter of the position. | |
| void | set_position (const std::vector< double > &position) |
| Setter of the position from a std vector. | |
| void | set_position (const double &x, const double &y, const double &z) |
| Setter of the position from three scalar coordinates. | |
| void | set_orientation (const Eigen::Quaterniond &orientation) |
| Setter of the orientation. | |
| void | set_orientation (const Eigen::Vector4d &orientation) |
| Setter of the orientation from a 4d vector. | |
| void | set_orientation (const std::vector< double > &orientation) |
| Setter of the orientation from a std vector. | |
| void | set_orientation (const double &w, const double &x, const double &y, const double &z) |
| Setter of the orientation from four scalar coefficients (w, x, y, z) | |
| void | set_pose (const Eigen::Vector3d &position, const Eigen::Quaterniond &orientation) |
| Setter of the pose from both position and orientation. | |
| void | set_pose (const Eigen::Matrix< double, 7, 1 > &pose) |
| Setter of the pose from both position and orientation as Eigen 7d vector. | |
| void | set_pose (const std::vector< double > &pose) |
| Setter of the pose from both position and orientation as std vector. | |
| void | set_linear_velocity (const Eigen::Vector3d &linear_velocity) |
| Setter of the linear velocity attribute. | |
| void | set_linear_velocity (const std::vector< double > &linear_velocity) |
| Setter of the linear velocity from a std vector. | |
| void | set_linear_velocity (const double &x, const double &y, const double &z) |
| Setter of the linear velocity from three scalar coordinates. | |
| void | set_angular_velocity (const Eigen::Vector3d &angular_velocity) |
| Setter of the angular velocity attribute. | |
| void | set_angular_velocity (const std::vector< double > &angular_velocity) |
| Setter of the angular velocity from a std vector. | |
| void | set_angular_velocity (const double &x, const double &y, const double &z) |
| Setter of the angular velocity from three scalar coordinates. | |
| void | set_twist (const Eigen::Matrix< double, 6, 1 > &twist) |
| Setter of the linear and angular velocities from a 6d twist vector. | |
| void | set_twist (const std::vector< double > &twist) |
| Setter of the linear and angular velocities from a std vector. | |
| void | set_linear_acceleration (const Eigen::Vector3d &linear_acceleration) |
| Setter of the linear acceleration attribute. | |
| void | set_linear_acceleration (const std::vector< double > &linear_acceleration) |
| Setter of the linear acceleration from a std vector. | |
| void | set_linear_acceleration (const double &x, const double &y, const double &z) |
| Setter of the linear acceleration from three scalar coordinates. | |
| void | set_angular_acceleration (const Eigen::Vector3d &angular_acceleration) |
| Setter of the angular velocity attribute. | |
| void | set_angular_acceleration (const std::vector< double > &angular_acceleration) |
| Setter of the angular acceleration from a std vector. | |
| void | set_angular_acceleration (const double &x, const double &y, const double &z) |
| Setter of the angular acceleration from three scalar coordinates. | |
| void | set_acceleration (const Eigen::Matrix< double, 6, 1 > &acceleration) |
| Setter of the linear and angular acceleration from a 6d acceleration vector. | |
| void | set_acceleration (const std::vector< double > &acceleration) |
| Setter of the linear and angular acceleration from a std vector. | |
| void | set_force (const Eigen::Vector3d &force) |
| Setter of the force attribute. | |
| void | set_force (const std::vector< double > &force) |
| Setter of the force from a std vector. | |
| void | set_force (const double &x, const double &y, const double &z) |
| Setter of the force from three scalar coordinates. | |
| void | set_torque (const Eigen::Vector3d &torque) |
| Setter of the torque attribute. | |
| void | set_torque (const std::vector< double > &torque) |
| Setter of the torque from a std vector. | |
| void | set_torque (const double &x, const double &y, const double &z) |
| Setter of the torque from three scalar coordinates. | |
| void | set_wrench (const Eigen::Matrix< double, 6, 1 > &wrench) |
| Setter of the force and torque from a 6d wrench vector. | |
| void | set_wrench (const std::vector< double > &wrench) |
| Setter of the force and torque from a std vector. | |
| virtual void | set_data (const Eigen::VectorXd &data) override |
| Set the data of the state from all the state variables in a single Eigen vector. | |
| virtual void | set_data (const std::vector< double > &data) override |
| Set the data of the state from all the state variables in a single std vector. | |
| void | set_zero () |
| Set the State to a zero value. | |
| void | clamp_state_variable (double max_norm, const CartesianStateVariable &state_variable_type, double noise_ratio=0) |
| Clamp inplace the norm of the a specific state variable. | |
| CartesianState | copy () const |
| Return a copy of the Cartesian state. | |
| double | dist (const CartesianState &state, const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) const |
| Compute the distance to another state as the sum of distances between each features. | |
| void | reset () override |
| Reset the object to a post-construction state. | |
| CartesianState | inverse () const |
| Compute the inverse of the current Cartesian state. | |
| void | normalize (const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) |
| Normalize inplace the state at the state variable given in argument. Default is full state. | |
| CartesianState | normalized (const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) const |
| Compute the normalized state at the state variable given in argument. Default is full state. | |
| virtual std::vector< double > | norms (const CartesianStateVariable &state_variable_type=CartesianStateVariable::ALL) const |
| Compute the norms of the state variable specified by the input type. Default is full state. | |
| CartesianState & | operator*= (const CartesianState &state) |
| Transform inplace a Cartesian state into the current reference frame. | |
| CartesianState | operator* (const CartesianState &state) const |
| Transform a Cartesian state into the left operand state reference frame. | |
| CartesianState & | operator*= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianState | operator* (double lambda) const |
| Scale a Cartesian pose by a scalar. | |
| Eigen::Vector3d | operator* (const Eigen::Vector3d &vector) const |
| Transform a vector into the state reference frame. | |
| CartesianState & | operator/= (double lambda) |
| Scale inplace by a scalar. | |
| CartesianState | operator/ (double lambda) const |
| Scale a Cartesian state by a scalar. | |
| CartesianState & | operator+= (const CartesianState &state) |
| Add inplace another Cartesian state. | |
| CartesianState | operator+ (const CartesianState &state) const |
| Add another Cartesian state. | |
| CartesianState | operator- () const |
| Negate a Cartesian state. | |
| CartesianState & | operator-= (const CartesianState &state) |
| Compute inplace the difference with another Cartesian state. | |
| CartesianState | operator- (const CartesianState &state) const |
| Compute the difference with another Cartesian state. | |
 Public Member Functions inherited from state_representation::SpatialState Public Member Functions inherited from state_representation::SpatialState | |
| SpatialState () | |
| Empty constructor. | |
| SpatialState (const std::string &name, const std::string &reference_frame="world") | |
| Constructor with name and reference frame specification. | |
| SpatialState (const SpatialState &state) | |
| Copy constructor from another spatial state. | |
| SpatialState & | operator= (const SpatialState &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const std::string & | get_reference_frame () const |
| Getter of the reference frame as const reference. | |
| virtual void | set_reference_frame (const std::string &reference_frame) |
| Setter of the reference frame. | |
| bool | is_incompatible (const State &state) const override |
| Check if the spatial state is incompatible for operations with the state given as argument. | |
| Public Member Functions inherited from state_representation::State | |
| State () | |
| Empty constructor. | |
| State (const std::string &name) | |
| Constructor with name specification. | |
| State (const State &state) | |
| Copy constructor from another state. | |
| virtual | ~State ()=default |
| Virtual destructor. | |
| State & | operator= (const State &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const StateType & | get_type () const |
| Getter of the type attribute. | |
| const std::string & | get_name () const |
| Getter of the name attribute. | |
| bool | is_empty () const |
| Getter of the empty attribute. | |
| const std::chrono::time_point< std::chrono::steady_clock > & | get_timestamp () const |
| Getter of the timestamp attribute. | |
| virtual void | set_name (const std::string &name) |
| Setter of the name attribute. | |
| void | reset_timestamp () |
| Reset the timestamp attribute to now. | |
| virtual void | set_data (const Eigen::MatrixXd &data) |
| Set the data of the state from an Eigen matrix. | |
| double | get_age () const |
| Get the age of the state, i.e. the time since the last modification. | |
| bool | is_deprecated (double time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| template<typename DurationT > | |
| bool | is_deprecated (const std::chrono::duration< int64_t, DurationT > &time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| operator bool () const noexcept | |
| Boolean operator for the truthiness of a state. | |
Static Public Member Functions | |
| static CartesianState | Identity (const std::string &name, const std::string &reference="world") |
| Constructor for the identity Cartesian state (identity pose and 0 for the rest) | |
| static CartesianState | Random (const std::string &name, const std::string &reference="world") |
| Constructor for a random Cartesian state. | |
Protected Member Functions | |
| Eigen::VectorXd | get_state_variable (const CartesianStateVariable &state_variable_type) const |
| Getter of the variable value corresponding to the input. | |
| void | set_state_variable (const Eigen::VectorXd &new_value, const CartesianStateVariable &state_variable_type) |
| Setter of the variable value corresponding to the input. | |
| void | set_state_variable (const std::vector< double > &new_value, const CartesianStateVariable &state_variable_type) |
| Setter of the variable value corresponding to the input. | |
| std::string | to_string () const override |
| Convert the state to its string representation. | |
| Protected Member Functions inherited from state_representation::SpatialState | |
| std::string | to_string () const override |
| Convert the state to its string representation. | |
| Protected Member Functions inherited from state_representation::State | |
| void | set_type (const StateType &type) |
| Setter of the state type attribute. | |
| void | set_empty (bool empty=true) |
| Setter of the empty attribute. | |
| void | assert_not_empty () const |
| Throw an exception if the state is empty. | |
Friends | |
| void | swap (CartesianState &state1, CartesianState &state2) |
| Swap the values of two Cartesian states. | |
| double | dist (const CartesianState &s1, const CartesianState &s2, const CartesianStateVariable &state_variable_type) |
| Compute the distance between two Cartesian states. | |
| CartesianState | operator* (double lambda, const CartesianState &state) |
| Scale a Cartesian state by a scalar. | |
| std::ostream & | operator<< (std::ostream &os, const CartesianState &state) |
| Overload the ostream operator for printing. | |
Detailed Description
Class to represent a state in Cartesian space.
Definition at line 48 of file CartesianState.hpp.
Constructor & Destructor Documentation
◆ CartesianState() [1/3]
| state_representation::CartesianState::CartesianState | ( | ) |
Empty constructor.
Definition at line 43 of file CartesianState.cpp.
◆ CartesianState() [2/3]
|
explicit |
Constructor with name and reference frame provided.
Definition at line 56 of file CartesianState.cpp.
◆ CartesianState() [3/3]
| state_representation::CartesianState::CartesianState | ( | const CartesianState & | state | ) |
Copy constructor of a Cartesian state.
Definition at line 61 of file CartesianState.cpp.
Member Function Documentation
◆ array()
| Eigen::ArrayXd state_representation::CartesianState::array | ( | ) | const |
Return the data vector as an Eigen Array.
Definition at line 210 of file CartesianState.cpp.
◆ clamp_state_variable()
| void state_representation::CartesianState::clamp_state_variable | ( | double | max_norm, |
| const CartesianStateVariable & | state_variable_type, | ||
| double | noise_ratio = 0 |
||
| ) |
Clamp inplace the norm of the a specific state variable.
- Parameters
-
max_norm The maximum norm of the state variable state_variable_type Name of the variable from the CartesianStateVariable structure to clamp noise_ratio If provided, this value will be used to apply a dead zone under which the norm of the state variable will be set to 0
Definition at line 449 of file CartesianState.cpp.
◆ copy()
| CartesianState state_representation::CartesianState::copy | ( | ) | const |
Return a copy of the Cartesian state.
Definition at line 467 of file CartesianState.cpp.
◆ data()
|
virtual |
Return the data as the concatenation of all the state variables in a single vector.
Reimplemented in state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianTwist, and state_representation::CartesianWrench.
Definition at line 206 of file CartesianState.cpp.
◆ dist()
| double state_representation::CartesianState::dist | ( | const CartesianState & | state, |
| const CartesianStateVariable & | state_variable_type = CartesianStateVariable::ALL |
||
| ) | const |
Compute the distance to another state as the sum of distances between each features.
- Parameters
-
state The second state state_variable_type The name of the variable from the CartesianStateVariable structure to apply the distance on. Default ALL for full distance across all dimensions
- Returns
- dist The distance value as a double
Definition at line 472 of file CartesianState.cpp.
◆ get_acceleration()
| Eigen::Matrix< double, 6, 1 > state_representation::CartesianState::get_acceleration | ( | ) | const |
Getter of the 6d acceleration from linear and angular acceleration attributes.
Definition at line 188 of file CartesianState.cpp.
◆ get_angular_acceleration()
| const Eigen::Vector3d & state_representation::CartesianState::get_angular_acceleration | ( | ) | const |
Getter of the angular acceleration attribute.
Definition at line 183 of file CartesianState.cpp.
◆ get_angular_velocity()
| const Eigen::Vector3d & state_representation::CartesianState::get_angular_velocity | ( | ) | const |
Getter of the angular velocity attribute.
Definition at line 169 of file CartesianState.cpp.
◆ get_force()
| const Eigen::Vector3d & state_representation::CartesianState::get_force | ( | ) | const |
Getter of the force attribute.
Definition at line 192 of file CartesianState.cpp.
◆ get_linear_acceleration()
| const Eigen::Vector3d & state_representation::CartesianState::get_linear_acceleration | ( | ) | const |
Getter of the linear acceleration attribute.
Definition at line 178 of file CartesianState.cpp.
◆ get_linear_velocity()
| const Eigen::Vector3d & state_representation::CartesianState::get_linear_velocity | ( | ) | const |
Getter of the linear velocity attribute.
Definition at line 164 of file CartesianState.cpp.
◆ get_orientation()
| const Eigen::Quaterniond & state_representation::CartesianState::get_orientation | ( | ) | const |
Getter of the orientation attribute.
Definition at line 144 of file CartesianState.cpp.
◆ get_orientation_coefficients()
| Eigen::Vector4d state_representation::CartesianState::get_orientation_coefficients | ( | ) | const |
Getter of the orientation attribute as Vector4d of coefficients.
Quaternion coefficients are returned using the (w, x, y, z) convention
Definition at line 149 of file CartesianState.cpp.
◆ get_pose()
| Eigen::Matrix< double, 7, 1 > state_representation::CartesianState::get_pose | ( | ) | const |
Getter of the pose from position and orientation attributes.
- Returns
- The pose as a 7d vector. Quaternion coefficients are returned using the (w, x, y, z) convention
Definition at line 153 of file CartesianState.cpp.
◆ get_position()
| const Eigen::Vector3d & state_representation::CartesianState::get_position | ( | ) | const |
Getter of the position attribute.
Definition at line 139 of file CartesianState.cpp.
◆ get_state_variable()
|
protected |
Getter of the variable value corresponding to the input.
- Parameters
-
state_variable_type The type of variable to get
Definition at line 89 of file CartesianState.cpp.
◆ get_torque()
| const Eigen::Vector3d & state_representation::CartesianState::get_torque | ( | ) | const |
Getter of the torque attribute.
Definition at line 197 of file CartesianState.cpp.
◆ get_transformation_matrix()
| Eigen::Matrix4d state_representation::CartesianState::get_transformation_matrix | ( | ) | const |
Getter of a pose from position and orientation attributes.
- Returns
- The pose as a 4x4 transformation matrix
Definition at line 157 of file CartesianState.cpp.
◆ get_twist()
| Eigen::Matrix< double, 6, 1 > state_representation::CartesianState::get_twist | ( | ) | const |
Getter of the 6d twist from linear and angular velocity attributes.
Definition at line 174 of file CartesianState.cpp.
◆ get_wrench()
| Eigen::Matrix< double, 6, 1 > state_representation::CartesianState::get_wrench | ( | ) | const |
Getter of the 6d wrench from force and torque attributes.
Definition at line 202 of file CartesianState.cpp.
◆ Identity()
|
static |
Constructor for the identity Cartesian state (identity pose and 0 for the rest)
Definition at line 68 of file CartesianState.cpp.
◆ inverse()
| CartesianState state_representation::CartesianState::inverse | ( | ) | const |
Compute the inverse of the current Cartesian state.
The spatial properties of a CartesianState are measured at the frame and expressed in the reference frame coordinate system. The inverse operation yields the spatial properties of the reference frame as measured from the previous frame. For a state A expressed in reference frame B, the result will be frame B expressed in reference frame A.
- Warning
- The wrench is not supported by this operation will be set to zero
- Returns
- The inverse state
Definition at line 524 of file CartesianState.cpp.
◆ normalize()
| void state_representation::CartesianState::normalize | ( | const CartesianStateVariable & | state_variable_type = CartesianStateVariable::ALL | ) |
Normalize inplace the state at the state variable given in argument. Default is full state.
- Parameters
-
state_variable_type The type of state variable to compute the norms on
Definition at line 558 of file CartesianState.cpp.
◆ normalized()
| CartesianState state_representation::CartesianState::normalized | ( | const CartesianStateVariable & | state_variable_type = CartesianStateVariable::ALL | ) | const |
Compute the normalized state at the state variable given in argument. Default is full state.
- Parameters
-
state_variable_type The type of state variable to compute the norms on
- Returns
- The normalized state
Definition at line 598 of file CartesianState.cpp.
◆ norms()
|
virtual |
Compute the norms of the state variable specified by the input type. Default is full state.
- Parameters
-
state_variable_type The type of state variable to compute the norms on
- Returns
- The norms of the state variables as a vector
Reimplemented in state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianTwist, and state_representation::CartesianWrench.
Definition at line 604 of file CartesianState.cpp.
◆ operator*() [1/3]
| CartesianState state_representation::CartesianState::operator* | ( | const CartesianState & | state | ) | const |
Transform a Cartesian state into the left operand state reference frame.
: For a state A expressed in reference frame W multiplied with a state B expressed in reference frame A, the result of the transformation is a state B expressed in reference frame W.
- Parameters
-
state A Cartesian state expressed in the left operand frame
- Returns
- The transformed state expressed in the left operand reference frame
Definition at line 694 of file CartesianState.cpp.
◆ operator*() [2/3]
| Eigen::Vector3d state_representation::CartesianState::operator* | ( | const Eigen::Vector3d & | vector | ) | const |
Transform a vector into the state reference frame.
- Parameters
-
vector A position vector
- Returns
- The transformed vector expressed in the state reference frame
Definition at line 726 of file CartesianState.cpp.
◆ operator*() [3/3]
| CartesianState state_representation::CartesianState::operator* | ( | double | lambda | ) | const |
Scale a Cartesian pose by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The scaled Cartesian pose
Definition at line 716 of file CartesianState.cpp.
◆ operator*=() [1/2]
| CartesianState & state_representation::CartesianState::operator*= | ( | const CartesianState & | state | ) |
Transform inplace a Cartesian state into the current reference frame.
: For a state A expressed in reference frame W multiplied with a state B expressed in reference frame A, the result of the transformation is a state B expressed in reference frame W.
- Parameters
-
state A Cartesian state expressed in the current state frame
- Returns
- The transformed state expressed in the original reference frame
Definition at line 644 of file CartesianState.cpp.
◆ operator*=() [2/2]
| CartesianState & state_representation::CartesianState::operator*= | ( | double | lambda | ) |
Scale inplace by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
Definition at line 700 of file CartesianState.cpp.
◆ operator+()
| CartesianState state_representation::CartesianState::operator+ | ( | const CartesianState & | state | ) | const |
Add another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The combined Cartesian state
Definition at line 765 of file CartesianState.cpp.
◆ operator+=()
| CartesianState & state_representation::CartesianState::operator+= | ( | const CartesianState & | state | ) |
Add inplace another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The reference to the combined Cartesian state
Definition at line 744 of file CartesianState.cpp.
◆ operator-() [1/2]
| CartesianState state_representation::CartesianState::operator- | ( | ) | const |
Negate a Cartesian state.
- Returns
- The negative value of the Cartesian state
Definition at line 771 of file CartesianState.cpp.
◆ operator-() [2/2]
| CartesianState state_representation::CartesianState::operator- | ( | const CartesianState & | state | ) | const |
Compute the difference with another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The difference in all the state variables
Definition at line 791 of file CartesianState.cpp.
◆ operator-=()
| CartesianState & state_representation::CartesianState::operator-= | ( | const CartesianState & | state | ) |
Compute inplace the difference with another Cartesian state.
- Parameters
-
state A Cartesian state in the same reference frame
- Returns
- The reference to the difference in all the state variables
Definition at line 786 of file CartesianState.cpp.
◆ operator/()
| CartesianState state_representation::CartesianState::operator/ | ( | double | lambda | ) | const |
Scale a Cartesian state by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The scaled Cartesian state
Definition at line 738 of file CartesianState.cpp.
◆ operator/=()
| CartesianState & state_representation::CartesianState::operator/= | ( | double | lambda | ) |
Scale inplace by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
Definition at line 730 of file CartesianState.cpp.
◆ operator=()
| CartesianState & state_representation::CartesianState::operator= | ( | const CartesianState & | state | ) |
Copy assignment operator that has to be defined to the custom assignment operator.
- Parameters
-
state The state with value to assign
- Returns
- Reference to the current state with new values
Definition at line 83 of file CartesianState.cpp.
◆ Random()
|
static |
Constructor for a random Cartesian state.
Definition at line 75 of file CartesianState.cpp.
◆ reset()
|
overridevirtual |
Reset the object to a post-construction state.
Reimplemented from state_representation::State.
Definition at line 519 of file CartesianState.cpp.
◆ set_acceleration() [1/2]
| void state_representation::CartesianState::set_acceleration | ( | const Eigen::Matrix< double, 6, 1 > & | acceleration | ) |
Setter of the linear and angular acceleration from a 6d acceleration vector.
Definition at line 389 of file CartesianState.cpp.
◆ set_acceleration() [2/2]
| void state_representation::CartesianState::set_acceleration | ( | const std::vector< double > & | acceleration | ) |
Setter of the linear and angular acceleration from a std vector.
Definition at line 393 of file CartesianState.cpp.
◆ set_angular_acceleration() [1/3]
| void state_representation::CartesianState::set_angular_acceleration | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the angular acceleration from three scalar coordinates.
Definition at line 385 of file CartesianState.cpp.
◆ set_angular_acceleration() [2/3]
| void state_representation::CartesianState::set_angular_acceleration | ( | const Eigen::Vector3d & | angular_acceleration | ) |
Setter of the angular velocity attribute.
Definition at line 377 of file CartesianState.cpp.
◆ set_angular_acceleration() [3/3]
| void state_representation::CartesianState::set_angular_acceleration | ( | const std::vector< double > & | angular_acceleration | ) |
Setter of the angular acceleration from a std vector.
Definition at line 381 of file CartesianState.cpp.
◆ set_angular_velocity() [1/3]
| void state_representation::CartesianState::set_angular_velocity | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the angular velocity from three scalar coordinates.
Definition at line 353 of file CartesianState.cpp.
◆ set_angular_velocity() [2/3]
| void state_representation::CartesianState::set_angular_velocity | ( | const Eigen::Vector3d & | angular_velocity | ) |
Setter of the angular velocity attribute.
Definition at line 345 of file CartesianState.cpp.
◆ set_angular_velocity() [3/3]
| void state_representation::CartesianState::set_angular_velocity | ( | const std::vector< double > & | angular_velocity | ) |
Setter of the angular velocity from a std vector.
Definition at line 349 of file CartesianState.cpp.
◆ set_data() [1/2]
|
overridevirtual |
Set the data of the state from all the state variables in a single Eigen vector.
Reimplemented from state_representation::State.
Reimplemented in state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianTwist, and state_representation::CartesianWrench.
Definition at line 429 of file CartesianState.cpp.
◆ set_data() [2/2]
|
overridevirtual |
Set the data of the state from all the state variables in a single std vector.
Reimplemented from state_representation::State.
Reimplemented in state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianTwist, and state_representation::CartesianWrench.
Definition at line 433 of file CartesianState.cpp.
◆ set_force() [1/3]
| void state_representation::CartesianState::set_force | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the force from three scalar coordinates.
Definition at line 405 of file CartesianState.cpp.
◆ set_force() [2/3]
| void state_representation::CartesianState::set_force | ( | const Eigen::Vector3d & | force | ) |
Setter of the force attribute.
Definition at line 397 of file CartesianState.cpp.
◆ set_force() [3/3]
| void state_representation::CartesianState::set_force | ( | const std::vector< double > & | force | ) |
Setter of the force from a std vector.
Definition at line 401 of file CartesianState.cpp.
◆ set_linear_acceleration() [1/3]
| void state_representation::CartesianState::set_linear_acceleration | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the linear acceleration from three scalar coordinates.
Definition at line 373 of file CartesianState.cpp.
◆ set_linear_acceleration() [2/3]
| void state_representation::CartesianState::set_linear_acceleration | ( | const Eigen::Vector3d & | linear_acceleration | ) |
Setter of the linear acceleration attribute.
Definition at line 365 of file CartesianState.cpp.
◆ set_linear_acceleration() [3/3]
| void state_representation::CartesianState::set_linear_acceleration | ( | const std::vector< double > & | linear_acceleration | ) |
Setter of the linear acceleration from a std vector.
Definition at line 369 of file CartesianState.cpp.
◆ set_linear_velocity() [1/3]
| void state_representation::CartesianState::set_linear_velocity | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the linear velocity from three scalar coordinates.
Definition at line 341 of file CartesianState.cpp.
◆ set_linear_velocity() [2/3]
| void state_representation::CartesianState::set_linear_velocity | ( | const Eigen::Vector3d & | linear_velocity | ) |
Setter of the linear velocity attribute.
Definition at line 333 of file CartesianState.cpp.
◆ set_linear_velocity() [3/3]
| void state_representation::CartesianState::set_linear_velocity | ( | const std::vector< double > & | linear_velocity | ) |
Setter of the linear velocity from a std vector.
Definition at line 337 of file CartesianState.cpp.
◆ set_orientation() [1/4]
| void state_representation::CartesianState::set_orientation | ( | const double & | w, |
| const double & | x, | ||
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the orientation from four scalar coefficients (w, x, y, z)
Definition at line 316 of file CartesianState.cpp.
◆ set_orientation() [2/4]
| void state_representation::CartesianState::set_orientation | ( | const Eigen::Quaterniond & | orientation | ) |
Setter of the orientation.
Definition at line 301 of file CartesianState.cpp.
◆ set_orientation() [3/4]
| void state_representation::CartesianState::set_orientation | ( | const Eigen::Vector4d & | orientation | ) |
Setter of the orientation from a 4d vector.
- Parameters
-
orientation The orientation coefficients as a 4d vector. Quaternion coefficients use the (w, x, y, z) convention
Definition at line 308 of file CartesianState.cpp.
◆ set_orientation() [4/4]
| void state_representation::CartesianState::set_orientation | ( | const std::vector< double > & | orientation | ) |
Setter of the orientation from a std vector.
- Parameters
-
orientation The orientation coefficients as a 4d std vector. Quaternion coefficients use the (w, x, y, z) convention
Definition at line 312 of file CartesianState.cpp.
◆ set_pose() [1/3]
| void state_representation::CartesianState::set_pose | ( | const Eigen::Matrix< double, 7, 1 > & | pose | ) |
Setter of the pose from both position and orientation as Eigen 7d vector.
- Parameters
-
pose The pose as a 7d vector. Quaternion coefficients use the (w, x, y, z) convention
Definition at line 325 of file CartesianState.cpp.
◆ set_pose() [2/3]
| void state_representation::CartesianState::set_pose | ( | const Eigen::Vector3d & | position, |
| const Eigen::Quaterniond & | orientation | ||
| ) |
Setter of the pose from both position and orientation.
Definition at line 320 of file CartesianState.cpp.
◆ set_pose() [3/3]
| void state_representation::CartesianState::set_pose | ( | const std::vector< double > & | pose | ) |
Setter of the pose from both position and orientation as std vector.
- Parameters
-
pose The pose as a 7d vector. Quaternion coefficients use the (w, x, y, z) convention
Definition at line 329 of file CartesianState.cpp.
◆ set_position() [1/3]
| void state_representation::CartesianState::set_position | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the position from three scalar coordinates.
Definition at line 297 of file CartesianState.cpp.
◆ set_position() [2/3]
| void state_representation::CartesianState::set_position | ( | const Eigen::Vector3d & | position | ) |
Setter of the position.
Definition at line 289 of file CartesianState.cpp.
◆ set_position() [3/3]
| void state_representation::CartesianState::set_position | ( | const std::vector< double > & | position | ) |
Setter of the position from a std vector.
Definition at line 293 of file CartesianState.cpp.
◆ set_state_variable() [1/2]
|
protected |
Setter of the variable value corresponding to the input.
- Parameters
-
new_value The new value of the variable as Eigen vector state_variable_type The type of variable to set
Definition at line 225 of file CartesianState.cpp.
◆ set_state_variable() [2/2]
|
protected |
Setter of the variable value corresponding to the input.
- Parameters
-
new_value The new value of the variable as std vector state_variable_type The type of variable to set
Definition at line 219 of file CartesianState.cpp.
◆ set_torque() [1/3]
| void state_representation::CartesianState::set_torque | ( | const double & | x, |
| const double & | y, | ||
| const double & | z | ||
| ) |
Setter of the torque from three scalar coordinates.
Definition at line 417 of file CartesianState.cpp.
◆ set_torque() [2/3]
| void state_representation::CartesianState::set_torque | ( | const Eigen::Vector3d & | torque | ) |
Setter of the torque attribute.
Definition at line 409 of file CartesianState.cpp.
◆ set_torque() [3/3]
| void state_representation::CartesianState::set_torque | ( | const std::vector< double > & | torque | ) |
Setter of the torque from a std vector.
Definition at line 413 of file CartesianState.cpp.
◆ set_twist() [1/2]
| void state_representation::CartesianState::set_twist | ( | const Eigen::Matrix< double, 6, 1 > & | twist | ) |
Setter of the linear and angular velocities from a 6d twist vector.
Definition at line 357 of file CartesianState.cpp.
◆ set_twist() [2/2]
| void state_representation::CartesianState::set_twist | ( | const std::vector< double > & | twist | ) |
Setter of the linear and angular velocities from a std vector.
Definition at line 361 of file CartesianState.cpp.
◆ set_wrench() [1/2]
| void state_representation::CartesianState::set_wrench | ( | const Eigen::Matrix< double, 6, 1 > & | wrench | ) |
Setter of the force and torque from a 6d wrench vector.
Definition at line 421 of file CartesianState.cpp.
◆ set_wrench() [2/2]
| void state_representation::CartesianState::set_wrench | ( | const std::vector< double > & | wrench | ) |
Setter of the force and torque from a std vector.
Definition at line 425 of file CartesianState.cpp.
◆ set_zero()
| void state_representation::CartesianState::set_zero | ( | ) |
Set the State to a zero value.
Definition at line 437 of file CartesianState.cpp.
◆ to_std_vector()
| std::vector< double > state_representation::CartesianState::to_std_vector | ( | ) | const |
Return the state as a std vector.
Definition at line 214 of file CartesianState.cpp.
◆ to_string()
|
overrideprotectedvirtual |
Convert the state to its string representation.
Reimplemented from state_representation::State.
Definition at line 802 of file CartesianState.cpp.
Friends And Related Symbol Documentation
◆ dist
|
friend |
Compute the distance between two Cartesian states.
- Parameters
-
s1 The first Cartesian state s2 The second Cartesian state state_variable_type Type of the distance between position, orientation, linear_velocity, etc. Default ALL for full distance across all dimensions
- Returns
- The distance between the two states
- Parameters
-
s1 The first Cartesian state s2 The second Cartesian state state_variable_type Name of the state variable from the CartesianStateVariable enum to apply the distance on. Default ALL for full distance across all dimensions
- Returns
- The distance between the two states
Definition at line 515 of file CartesianState.cpp.
◆ operator*
|
friend |
Scale a Cartesian state by a scalar.
: All state variables in all their dimensions are scaled by the same factor.
- Parameters
-
lambda The scaling factor
- Returns
- The reference to the scaled Cartesian state
- Parameters
-
lambda The scaling factor state The Cartesian state to be scaled
- Returns
- The scaled Cartesian state
Definition at line 722 of file CartesianState.cpp.
◆ operator<<
|
friend |
Overload the ostream operator for printing.
- Parameters
-
os The ostream to append the string representing the state to state The state to print
- Returns
- The appended ostream
Definition at line 833 of file CartesianState.cpp.
◆ swap
|
friend |
Swap the values of two Cartesian states.
- Parameters
-
state1 Cartesian state to be swapped with 2 state2 Cartesian state to be swapped with 1
Definition at line 590 of file CartesianState.hpp.
The documentation for this class was generated from the following files:
- /github/workspace/source/state_representation/include/state_representation/space/cartesian/CartesianState.hpp
- /github/workspace/source/state_representation/src/space/cartesian/CartesianState.cpp