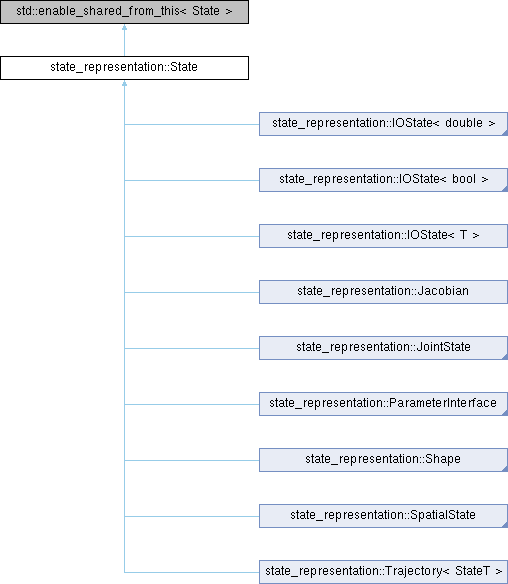
Abstract class to represent a state. More...
#include <State.hpp>
Public Member Functions | |
| State () | |
| Empty constructor. | |
| State (const std::string &name) | |
| Constructor with name specification. | |
| State (const State &state) | |
| Copy constructor from another state. | |
| virtual | ~State ()=default |
| Virtual destructor. | |
| State & | operator= (const State &state) |
| Copy assignment operator that has to be defined to the custom assignment operator. | |
| const StateType & | get_type () const |
| Getter of the type attribute. | |
| const std::string & | get_name () const |
| Getter of the name attribute. | |
| bool | is_empty () const |
| Getter of the empty attribute. | |
| const std::chrono::time_point< std::chrono::steady_clock > & | get_timestamp () const |
| Getter of the timestamp attribute. | |
| virtual void | set_name (const std::string &name) |
| Setter of the name attribute. | |
| void | reset_timestamp () |
| Reset the timestamp attribute to now. | |
| virtual void | set_data (const Eigen::VectorXd &data) |
| Set the data of the state from an Eigen vector. | |
| virtual void | set_data (const std::vector< double > &data) |
| Set the data of the state from a std vector. | |
| virtual void | set_data (const Eigen::MatrixXd &data) |
| Set the data of the state from an Eigen matrix. | |
| double | get_age () const |
| Get the age of the state, i.e. the time since the last modification. | |
| virtual bool | is_incompatible (const State &state) const |
| Check if the state is incompatible for operations with the state given as argument. | |
| bool | is_deprecated (double time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| template<typename DurationT > | |
| bool | is_deprecated (const std::chrono::duration< int64_t, DurationT > &time_delay) const |
| Check if the state is deprecated given a certain time delay. | |
| virtual void | reset () |
| Reset the object to a post-construction state. | |
| operator bool () const noexcept | |
| Boolean operator for the truthiness of a state. | |
Protected Member Functions | |
| void | set_type (const StateType &type) |
| Setter of the state type attribute. | |
| void | set_empty (bool empty=true) |
| Setter of the empty attribute. | |
| void | assert_not_empty () const |
| Throw an exception if the state is empty. | |
| virtual std::string | to_string () const |
| Convert the state to its string representation. | |
Friends | |
| void | swap (State &state1, State &state2) |
| Swap the values of the two states. | |
| std::ostream & | operator<< (std::ostream &os, const State &state) |
| Overload the ostream operator for printing. | |
Detailed Description
Constructor & Destructor Documentation
◆ State() [1/3]
◆ State() [2/3]
|
explicit |
◆ State() [3/3]
| state_representation::State::State | ( | const State & | state | ) |
Member Function Documentation
◆ assert_not_empty()
|
protected |
Throw an exception if the state is empty.
- Exceptions
-
exceptions::EmptyStateException
◆ get_age()
| double state_representation::State::get_age | ( | ) | const |
◆ get_name()
| const std::string & state_representation::State::get_name | ( | ) | const |
◆ get_timestamp()
| const std::chrono::time_point< std::chrono::steady_clock > & state_representation::State::get_timestamp | ( | ) | const |
◆ get_type()
| const StateType & state_representation::State::get_type | ( | ) | const |
◆ is_deprecated() [1/2]
|
inline |
◆ is_deprecated() [2/2]
| bool state_representation::State::is_deprecated | ( | double | time_delay | ) | const |
◆ is_empty()
| bool state_representation::State::is_empty | ( | ) | const |
◆ is_incompatible()
|
virtual |
Check if the state is incompatible for operations with the state given as argument.
- Parameters
-
state The state to check compatibility with
Reimplemented in state_representation::IOState< T >, state_representation::IOState< bool >, state_representation::IOState< double >, state_representation::Jacobian, state_representation::JointState, and state_representation::SpatialState.
◆ operator bool()
|
explicitnoexcept |
◆ operator=()
◆ reset()
|
virtual |
Reset the object to a post-construction state.
Reimplemented in py_parameter::ParameterContainer, state_representation::Trajectory< StateT >, state_representation::AnalogIOState, state_representation::DigitalIOState, state_representation::Parameter< T >, state_representation::Parameter< bool >, state_representation::CartesianState, state_representation::Jacobian, and state_representation::JointState.
◆ reset_timestamp()
| void state_representation::State::reset_timestamp | ( | ) |
◆ set_data() [1/3]
|
virtual |
Set the data of the state from an Eigen matrix.
Reimplemented in state_representation::Jacobian.
◆ set_data() [2/3]
|
virtual |
Set the data of the state from an Eigen vector.
Reimplemented in state_representation::Ellipsoid, state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianState, state_representation::CartesianTwist, state_representation::CartesianWrench, state_representation::JointAccelerations, state_representation::JointPositions, state_representation::JointState, state_representation::JointTorques, and state_representation::JointVelocities.
◆ set_data() [3/3]
|
virtual |
Set the data of the state from a std vector.
Reimplemented in state_representation::IOState< double >, state_representation::IOState< T >, state_representation::IOState< bool >, state_representation::IOState< double >, state_representation::Ellipsoid, state_representation::CartesianAcceleration, state_representation::CartesianPose, state_representation::CartesianState, state_representation::CartesianTwist, state_representation::CartesianWrench, state_representation::JointAccelerations, state_representation::JointPositions, state_representation::JointState, state_representation::JointTorques, and state_representation::JointVelocities.
◆ set_empty()
|
protected |
◆ set_name()
|
virtual |
◆ set_type()
|
protected |
◆ to_string()
|
protectedvirtual |
Convert the state to its string representation.
Reimplemented in state_representation::AnalogIOState, state_representation::DigitalIOState, state_representation::Shape, state_representation::CartesianState, state_representation::JointState, and state_representation::SpatialState.
Friends And Related Symbol Documentation
◆ operator<<
|
friend |
◆ swap
The documentation for this class was generated from the following files: