Public Member Functions | |
| ControllerInterface (bool claim_all_state_interfaces=false) | |
| Default constructor. | |
| CallbackReturn | on_init () override |
| Declare parameters. | |
| CallbackReturn | on_configure (const rclcpp_lifecycle::State &previous_state) final |
| Set class properties from parameters. | |
| CallbackReturn | on_activate (const rclcpp_lifecycle::State &previous_state) final |
| Initialize internal data attributes from configured interfaces and wait for valid states from hardware. | |
| CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &previous_state) final |
| Deactivate the controller. | |
| controller_interface::return_type | update (const rclcpp::Time &time, const rclcpp::Duration &period) final |
| Read the state interfaces, perform control evaluation and write the command interfaces. | |
| controller_interface::InterfaceConfiguration | state_interface_configuration () const final |
| Configure the state interfaces. | |
| controller_interface::InterfaceConfiguration | command_interface_configuration () const final |
| Configure the command interfaces. | |
 Public Member Functions inherited from modulo_controllers::BaseControllerInterface Public Member Functions inherited from modulo_controllers::BaseControllerInterface | |
| BaseControllerInterface () | |
| Default constructor. | |
| CallbackReturn | on_init () override |
| Declare parameters and register the on_set_parameters callback. | |
| CallbackReturn | on_configure (const rclcpp_lifecycle::State &previous_state) override |
| Add signals. | |
| template<> | |
| void | write_output (const std::string &name, const bool &data) |
| template<> | |
| void | write_output (const std::string &name, const double &data) |
| template<> | |
| void | write_output (const std::string &name, const std::vector< double > &data) |
| template<> | |
| void | write_output (const std::string &name, const int &data) |
| template<> | |
| void | write_output (const std::string &name, const std::string &data) |
Protected Member Functions | |
| virtual CallbackReturn | add_interfaces () |
| Add interfaces like parameters, signals, services, and predicates to the controller. | |
| virtual CallbackReturn | on_configure () |
| Configure the controller. | |
| virtual CallbackReturn | on_activate () |
| Activate the controller. | |
| virtual CallbackReturn | on_deactivate () |
| Deactivate the controller. | |
| virtual controller_interface::return_type | read_state_interfaces () |
| Read the state interfaces. | |
| virtual controller_interface::return_type | write_command_interfaces (const rclcpp::Duration &period) |
| Write the command interfaces. | |
| virtual controller_interface::return_type | evaluate (const rclcpp::Time &time, const std::chrono::nanoseconds &period)=0 |
| The control logic callback. | |
| void | add_state_interface (const std::string &name, const std::string &interface) |
| Add a state interface to the controller by name. | |
| void | add_command_interface (const std::string &name, const std::string &interface) |
| Add a command interface to the controller by name. | |
| std::unordered_map< std::string, double > | get_state_interfaces (const std::string &name) const |
| Get a map containing the state interfaces by name of the parent tag. | |
| double | get_state_interface (const std::string &name, const std::string &interface) const |
| Get the value of a state interface by name. | |
| double | get_command_interface (const std::string &name, const std::string &interface) const |
| Get the value of a command interface by name. | |
| void | set_command_interface (const std::string &name, const std::string &interface, double value) |
| Set the value of a command interface by name. | |
| bool | on_validate_parameter_callback (const std::shared_ptr< state_representation::ParameterInterface > ¶meter) override |
| Parameter validation function to be redefined by derived controller classes. | |
| Protected Member Functions inherited from modulo_controllers::BaseControllerInterface | |
| void | add_parameter (const std::shared_ptr< state_representation::ParameterInterface > ¶meter, const std::string &description, bool read_only=false) |
| Add a parameter. | |
| template<typename T > | |
| void | add_parameter (const std::string &name, const T &value, const std::string &description, bool read_only=false) |
| Add a parameter. | |
| std::shared_ptr< state_representation::ParameterInterface > | get_parameter (const std::string &name) const |
| Get a parameter by name. | |
| template<typename T > | |
| T | get_parameter_value (const std::string &name) const |
| Get a parameter value by name. | |
| template<typename T > | |
| void | set_parameter_value (const std::string &name, const T &value) |
| Set the value of a parameter. | |
| template<typename T > | |
| void | add_assignment (const std::string &assignment_name) |
| Add an assignment to the map of assignments. | |
| template<typename T > | |
| void | set_assignment (const std::string &assignment_name, const T &assignment_value) |
| Set an assignment. | |
| template<typename T > | |
| T | get_assignment (const std::string &assignment_name) const |
| Get the value of an assignment. | |
| void | add_predicate (const std::string &predicate_name, bool predicate_value) |
| Add a predicate to the map of predicates. | |
| void | add_predicate (const std::string &predicate_name, const std::function< bool(void)> &predicate_function) |
| Add a predicate to the map of predicates based on a function to periodically call. | |
| bool | get_predicate (const std::string &predicate_name) const |
| Get the logical value of a predicate. | |
| void | set_predicate (const std::string &predicate_name, bool predicate_value) |
| Set the value of the predicate given as parameter, if the predicate is not found does not do anything. | |
| void | set_predicate (const std::string &predicate_name, const std::function< bool(void)> &predicate_function) |
| Set the value of the predicate given as parameter, if the predicate is not found does not do anything. | |
| void | add_trigger (const std::string &trigger_name) |
| Add a trigger to the controller. | |
| void | trigger (const std::string &trigger_name) |
| Latch the trigger with the provided name. | |
| template<typename T > | |
| void | add_input (const std::string &name, const std::string &topic_name="") |
| Add an input to the controller. | |
| template<typename T > | |
| void | add_output (const std::string &name, const std::string &topic_name="") |
| Add an output to the controller. | |
| template<typename T > | |
| std::optional< T > | read_input (const std::string &name) |
| Read the most recent message of an input. | |
| template<typename T > | |
| void | write_output (const std::string &name, const T &data) |
| Write an object to an output. | |
| void | add_service (const std::string &service_name, const std::function< ControllerServiceResponse(void)> &callback) |
| Add a service to trigger a callback function with no input arguments. | |
| void | add_service (const std::string &service_name, const std::function< ControllerServiceResponse(const std::string &string)> &callback) |
| Add a service to trigger a callback function with a string payload. | |
| void | add_service_lockfree (const std::string &service_name, const std::function< ControllerServiceResponse(void)> &callback) |
| void | add_service_lockfree (const std::string &service_name, const std::function< ControllerServiceResponse(const std::string &string)> &callback) |
| void | add_tf_listener () |
| Configure a transform buffer and listener. | |
| state_representation::CartesianPose | lookup_transform (const std::string &frame, const std::string &reference_frame, const tf2::TimePoint &time_point, const tf2::Duration &duration) |
| Look up a transform from TF. | |
| state_representation::CartesianPose | lookup_transform (const std::string &frame, const std::string &reference_frame="world", double validity_period=-1.0, const tf2::Duration &duration=tf2::Duration(std::chrono::microseconds(10))) |
| Look up a transform from TF. | |
| void | add_tf_broadcaster () |
| Configure a transform broadcaster. | |
| void | add_static_tf_broadcaster () |
| Configure a static transform broadcaster. | |
| void | send_transform (const state_representation::CartesianPose &transform) |
| Send a transform to TF. | |
| void | send_transforms (const std::vector< state_representation::CartesianPose > &transforms) |
| Send a vector of transforms to TF. | |
| void | send_static_transform (const state_representation::CartesianPose &transform) |
| Send a static transform to TF. | |
| void | send_static_transforms (const std::vector< state_representation::CartesianPose > &transforms) |
| Send a vector of static transforms to TF. | |
| rclcpp::QoS | get_qos () const |
| Getter of the Quality of Service attribute. | |
| void | set_qos (const rclcpp::QoS &qos) |
| Set the Quality of Service for ROS publishers and subscribers. | |
| bool | is_active () const |
| Check if the controller is currently in state active or not. | |
| std::timed_mutex & | get_command_mutex () |
| Get the reference to the command mutex. | |
| template<> | |
| void | add_input (const std::string &name, const std::string &topic_name) |
| template<> | |
| void | add_input (const std::string &name, const std::string &topic_name) |
| template<> | |
| void | add_input (const std::string &name, const std::string &topic_name) |
| template<> | |
| void | add_output (const std::string &name, const std::string &topic_name) |
| template<> | |
| void | add_output (const std::string &name, const std::string &topic_name) |
| template<> | |
| void | add_output (const std::string &name, const std::string &topic_name) |
| template<> | |
| std::optional< bool > | read_input (const std::string &name) |
| template<> | |
| std::optional< double > | read_input (const std::string &name) |
| template<> | |
| std::optional< int > | read_input (const std::string &name) |
Protected Attributes | |
| std::string | hardware_name_ |
| The hardware name provided by a parameter. | |
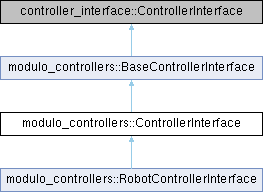
Detailed Description
Definition at line 10 of file ControllerInterface.hpp.
Constructor & Destructor Documentation
◆ ControllerInterface()
| modulo_controllers::ControllerInterface::ControllerInterface | ( | bool | claim_all_state_interfaces = false | ) |
Default constructor.
- Parameters
-
claim_all_state_interfaces Flag to indicate if all state interfaces should be claimed
Definition at line 9 of file ControllerInterface.cpp.
Member Function Documentation
◆ add_command_interface()
|
protected |
Add a command interface to the controller by name.
- Parameters
-
name The name of the parent tag, e.g. the name of the joint, sensor or gpio interface The desired command interface
Definition at line 77 of file ControllerInterface.cpp.
◆ add_interfaces()
|
protectedvirtual |
Add interfaces like parameters, signals, services, and predicates to the controller.
This function is called during the on_init callback of the base class to perform post-construction steps.
- Returns
- SUCCESS or ERROR
Reimplemented in modulo_controllers::RobotControllerInterface.
Definition at line 34 of file ControllerInterface.cpp.
◆ add_state_interface()
|
protected |
Add a state interface to the controller by name.
- Parameters
-
name The name of the parent tag, e.g. the name of the joint, sensor or gpio interface The desired state interface
Definition at line 73 of file ControllerInterface.cpp.
◆ command_interface_configuration()
|
final |
Configure the command interfaces.
- Returns
- The command interface configuration
Definition at line 99 of file ControllerInterface.cpp.
◆ evaluate()
|
protectedpure virtual |
The control logic callback.
This method should be overridden by derived classes. It is called in the update() method between reading the state interfaces and writing the command interfaces.
- Parameters
-
time The controller clock time period Time elapsed since the last control evaluation
- Returns
- OK or ERROR
◆ get_command_interface()
|
protected |
Get the value of a command interface by name.
- Parameters
-
name The name of the parent tag, e.g. the name of the joint, sensor or gpio interface The desired command interface
- Exceptions
-
out_of_range if the desired command interface is not available
- Returns
- The value of the command interface
Definition at line 278 of file ControllerInterface.cpp.
◆ get_state_interface()
|
protected |
Get the value of a state interface by name.
- Parameters
-
name The name of the parent tag, e.g. the name of the joint, sensor or gpio interface The desired state interface
- Exceptions
-
out_of_range if the desired state interface is not available
- Returns
- The value of the state interface
Definition at line 274 of file ControllerInterface.cpp.
◆ get_state_interfaces()
|
protected |
Get a map containing the state interfaces by name of the parent tag.
- Parameters
-
name The name of the parent tag, e.g. the name of the joint, sensor or gpio
- Exceptions
-
out_of_range if the desired state interface is not available
- Returns
- The map containing the values of the state interfaces
Definition at line 270 of file ControllerInterface.cpp.
◆ on_activate() [1/2]
|
protectedvirtual |
Activate the controller.
This method should be overridden by derived classes.
- Returns
- SUCCESS or ERROR
Reimplemented in modulo_controllers::RobotControllerInterface.
Definition at line 187 of file ControllerInterface.cpp.
◆ on_activate() [2/2]
|
final |
Initialize internal data attributes from configured interfaces and wait for valid states from hardware.
This functions calls the internal on_activate() method
- Parameters
-
previous_state The previous lifecycle state
- Returns
- SUCCESS or ERROR
Definition at line 134 of file ControllerInterface.cpp.
◆ on_configure() [1/2]
|
protectedvirtual |
Configure the controller.
This method should be overridden by derived classes.
- Returns
- SUCCESS or ERROR
Reimplemented in modulo_controllers::RobotControllerInterface.
Definition at line 69 of file ControllerInterface.cpp.
◆ on_configure() [2/2]
|
final |
Set class properties from parameters.
This functions calls the internal on_configure() method
- Parameters
-
previous_state The previous lifecycle state
- Returns
- SUCCESS or ERROR
Definition at line 39 of file ControllerInterface.cpp.
◆ on_deactivate() [1/2]
|
protectedvirtual |
Deactivate the controller.
This method should be overridden by derived classes.
- Returns
- SUCCESS or ERROR
Reimplemented in modulo_controllers::RobotControllerInterface.
Definition at line 208 of file ControllerInterface.cpp.
◆ on_deactivate() [2/2]
|
final |
Deactivate the controller.
- Parameters
-
previous_state The previous lifecycle state
- Returns
- SUCCESS or ERROR
Definition at line 192 of file ControllerInterface.cpp.
◆ on_init()
|
override |
Declare parameters.
- Returns
- CallbackReturn status
Definition at line 12 of file ControllerInterface.cpp.
◆ on_validate_parameter_callback()
|
overrideprotectedvirtual |
Parameter validation function to be redefined by derived controller classes.
This method is automatically invoked whenever the ROS interface tried to modify a parameter. Validation and sanitization can be performed by reading or writing the value of the parameter through the ParameterInterface pointer, depending on the parameter name and desired controller behaviour. If the validation returns true, the updated parameter value (including any modifications) is applied. If the validation returns false, any changes to the parameter are discarded and the parameter value is not changed.
- Parameters
-
parameter A ParameterInterface pointer to a Parameter instance
- Returns
- The validation result
Reimplemented from modulo_controllers::BaseControllerInterface.
Reimplemented in modulo_controllers::RobotControllerInterface.
Definition at line 292 of file ControllerInterface.cpp.
◆ read_state_interfaces()
|
protectedvirtual |
Read the state interfaces.
- Returns
- OK or ERROR
Definition at line 253 of file ControllerInterface.cpp.
◆ set_command_interface()
|
protected |
Set the value of a command interface by name.
- Parameters
-
name The name of the parent tag, e.g. the name of the sensor or gpio interface The name of the command interface value The new value of the interface
Definition at line 282 of file ControllerInterface.cpp.
◆ state_interface_configuration()
|
final |
Configure the state interfaces.
- Returns
- The state interface configuration
Definition at line 116 of file ControllerInterface.cpp.
◆ update()
|
final |
Read the state interfaces, perform control evaluation and write the command interfaces.
- Parameters
-
time The controller clock time period Time elapsed since the last control evaluation
- Returns
- OK or ERROR
Definition at line 213 of file ControllerInterface.cpp.
◆ write_command_interfaces()
|
protectedvirtual |
Write the command interfaces.
- Parameters
-
period Time elapsed since the last control evaluation
- Returns
- OK or ERROR
Definition at line 262 of file ControllerInterface.cpp.
Member Data Documentation
◆ hardware_name_
|
protected |
The hardware name provided by a parameter.
Definition at line 175 of file ControllerInterface.hpp.
The documentation for this class was generated from the following files:
- /github/workspace/source/modulo_controllers/include/modulo_controllers/ControllerInterface.hpp
- /github/workspace/source/modulo_controllers/src/ControllerInterface.cpp
Generated by